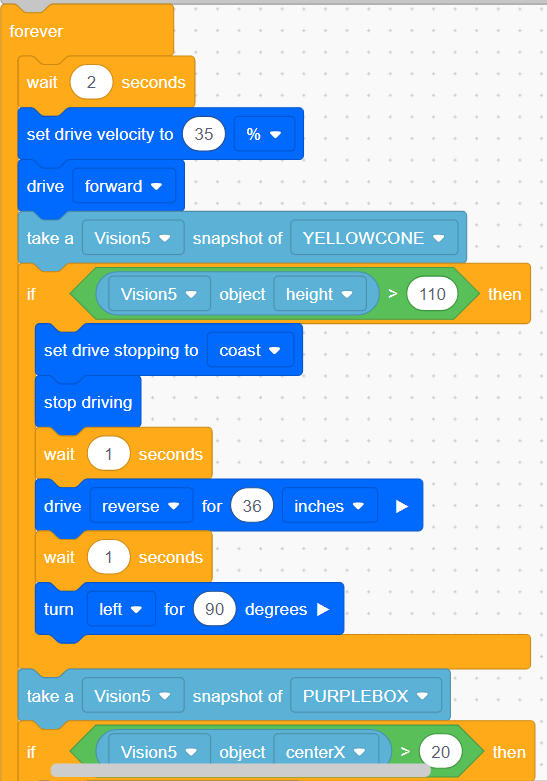
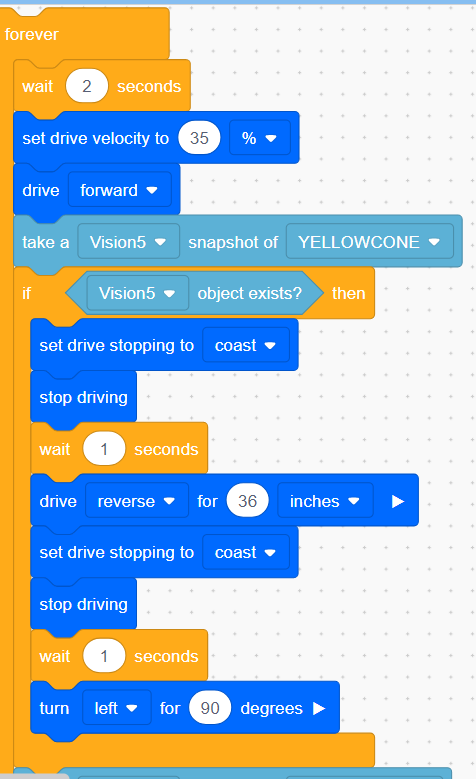
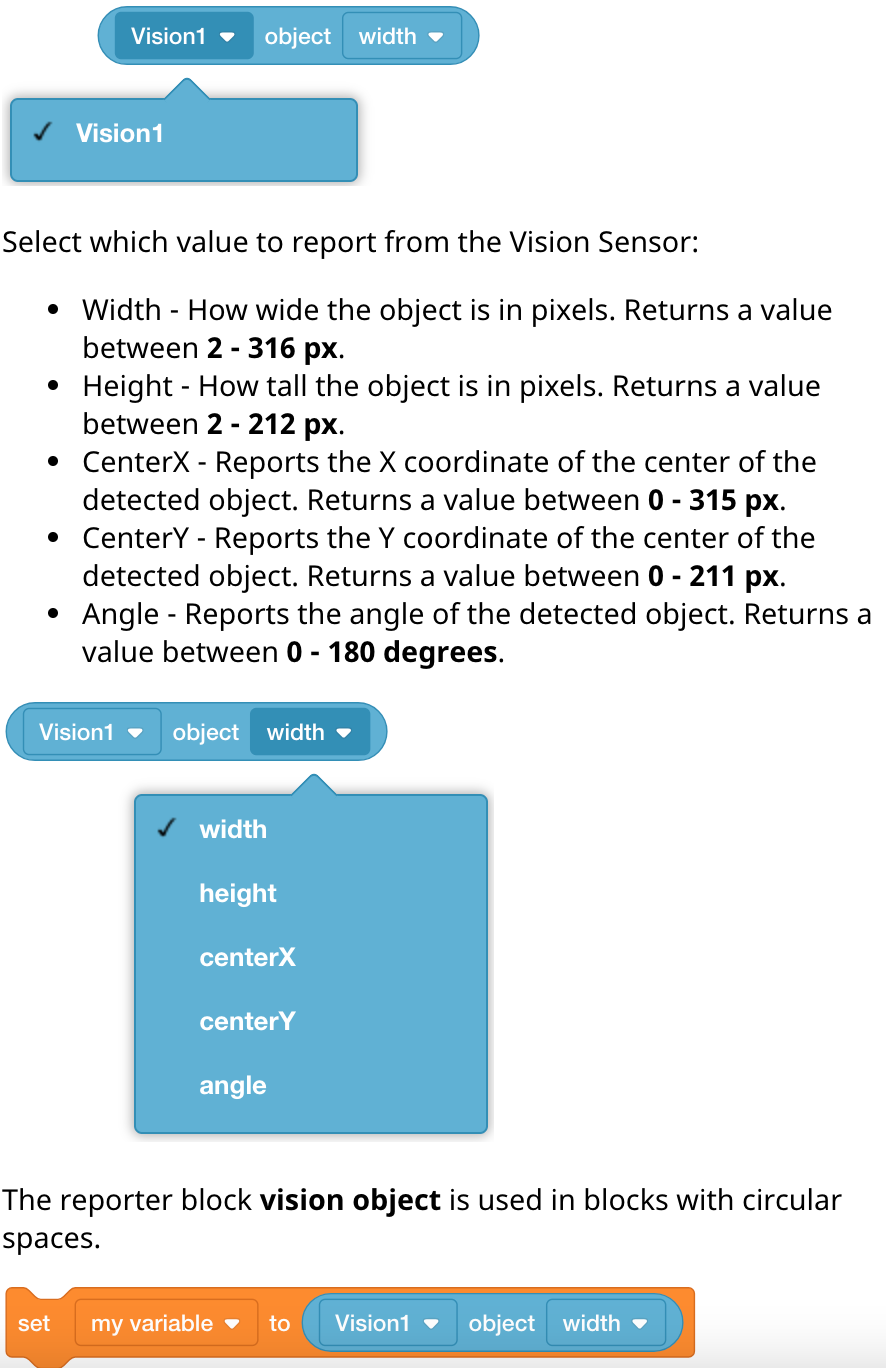
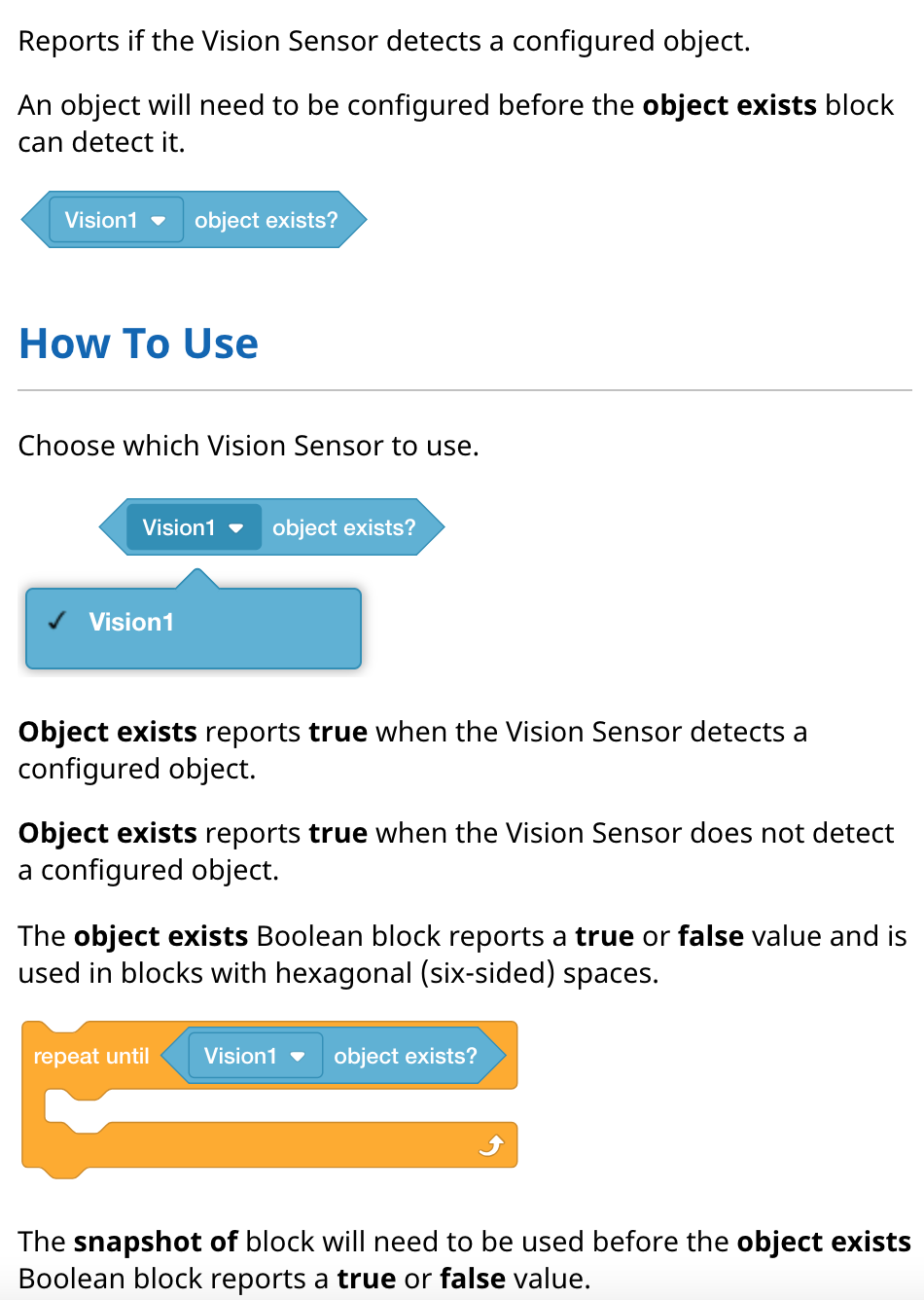
Program 1: Based on Heights (I set at 100 - 160). As the robot approaches the wall of colored blocks, the height of the color increases and at a specific height, the robot stops and goes in reverse. Since I had difficulty with the color Purple, I used "Center X" (1) instead of Height. Explanation of "Object: Height/Width/CenterX." Program 2: The robot would proceed forward until it saw one of the Defined Colors. At that moment, it would stop, reverse, turn and proceed. Explanation of "Objects exists." Note:
- If the robot immediately doesn't move forward but begins the "If/Then"...then change the 'Distance' to the Height or Center X.
- Also, the distance has a Sweet Spot. Eg: "85-120." Any amount outside of the Sweet Spot and you won't see any change in performance.
{kind=link}
{kind=link}