2. Program Your Robot
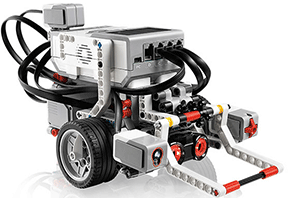
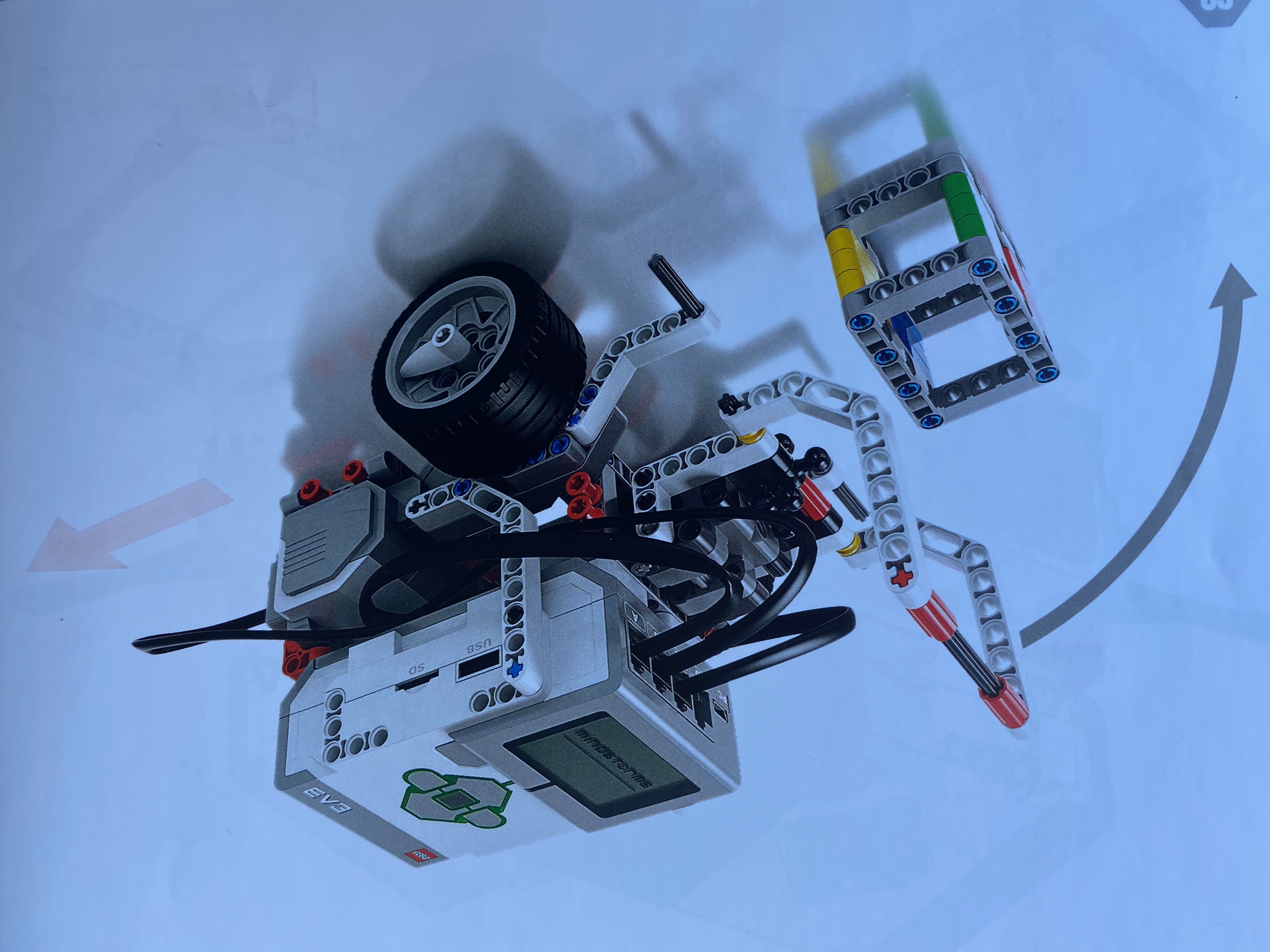
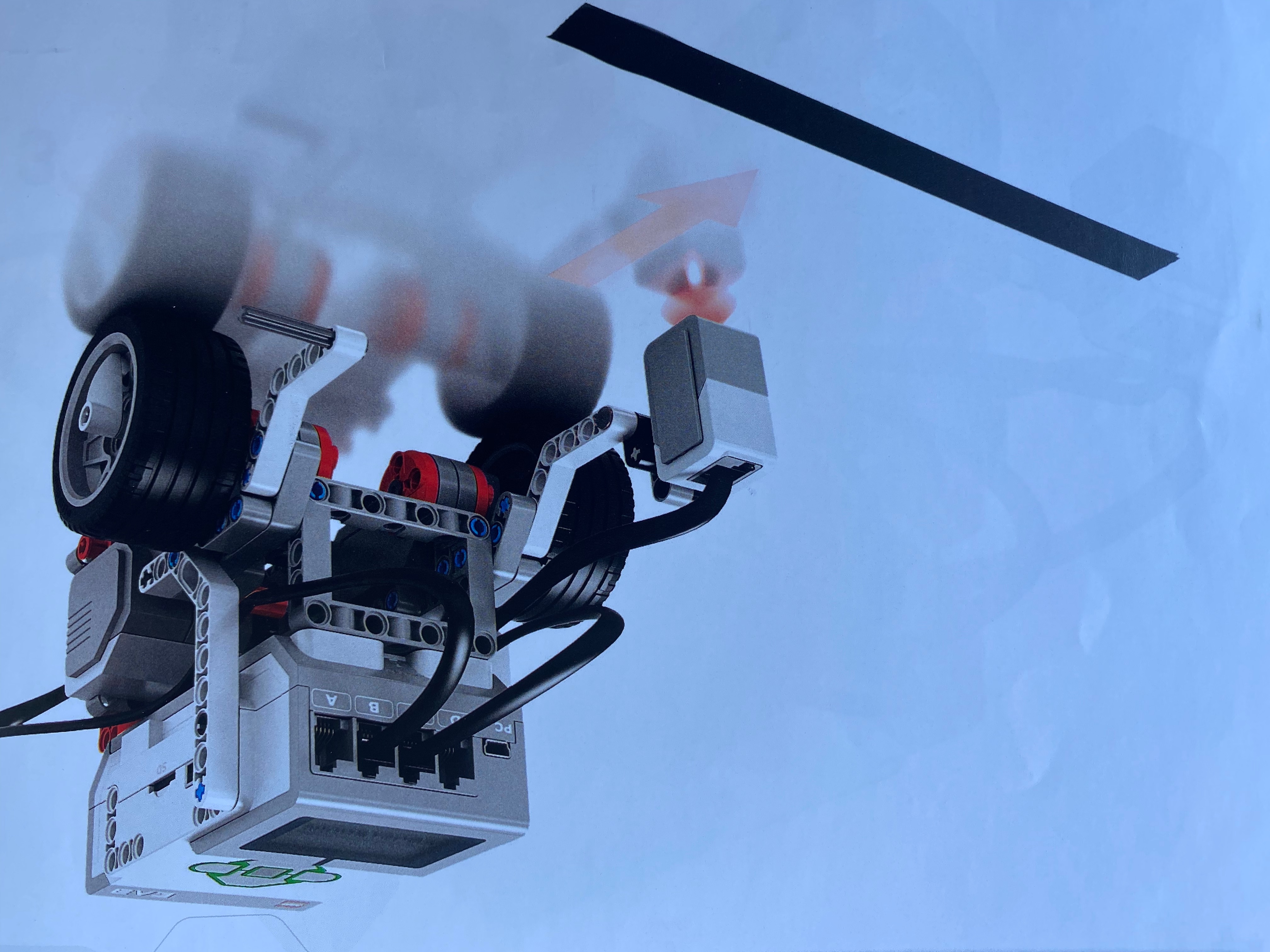
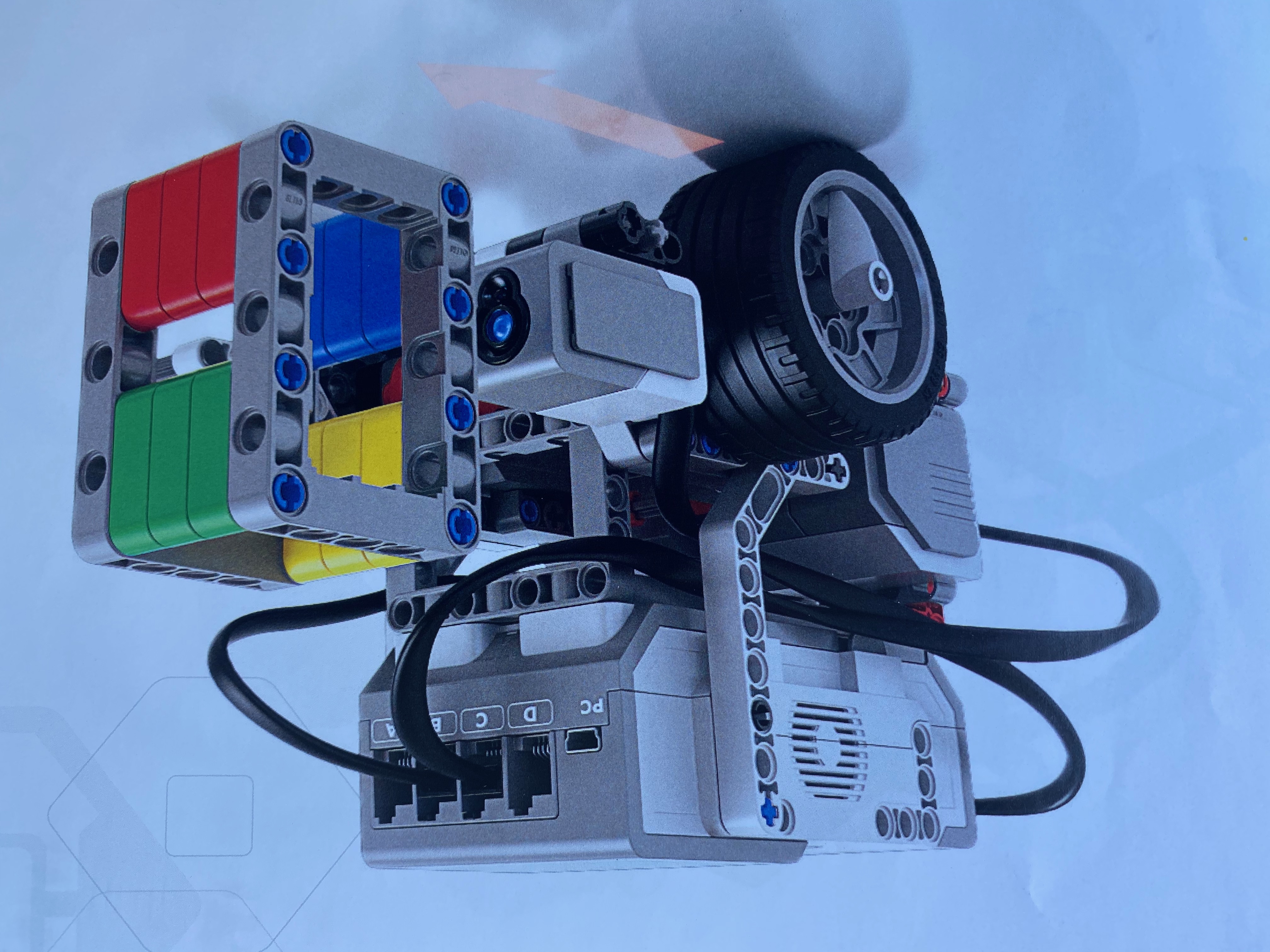
The base structure of your robot is complete. You will now learn how to program your robot. There are two ways that you will code your EV3. First is to hand code the Brick directly. Second is to eventually code it with your computer.
Let's start by learning how to Hand Code the actual robot. Click on this link to access a Tutorial Explaining How To Manually Program Your EV3.
Pull the slider and begin the video at 1:06.
Here is a Cheat Sheet I created that has tips on how to Hand Code your EV3.
Also, if you don't already have one...here is the EV3 Programming Gradesheet! This gradesheet matches the instructions provided below.
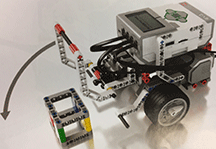
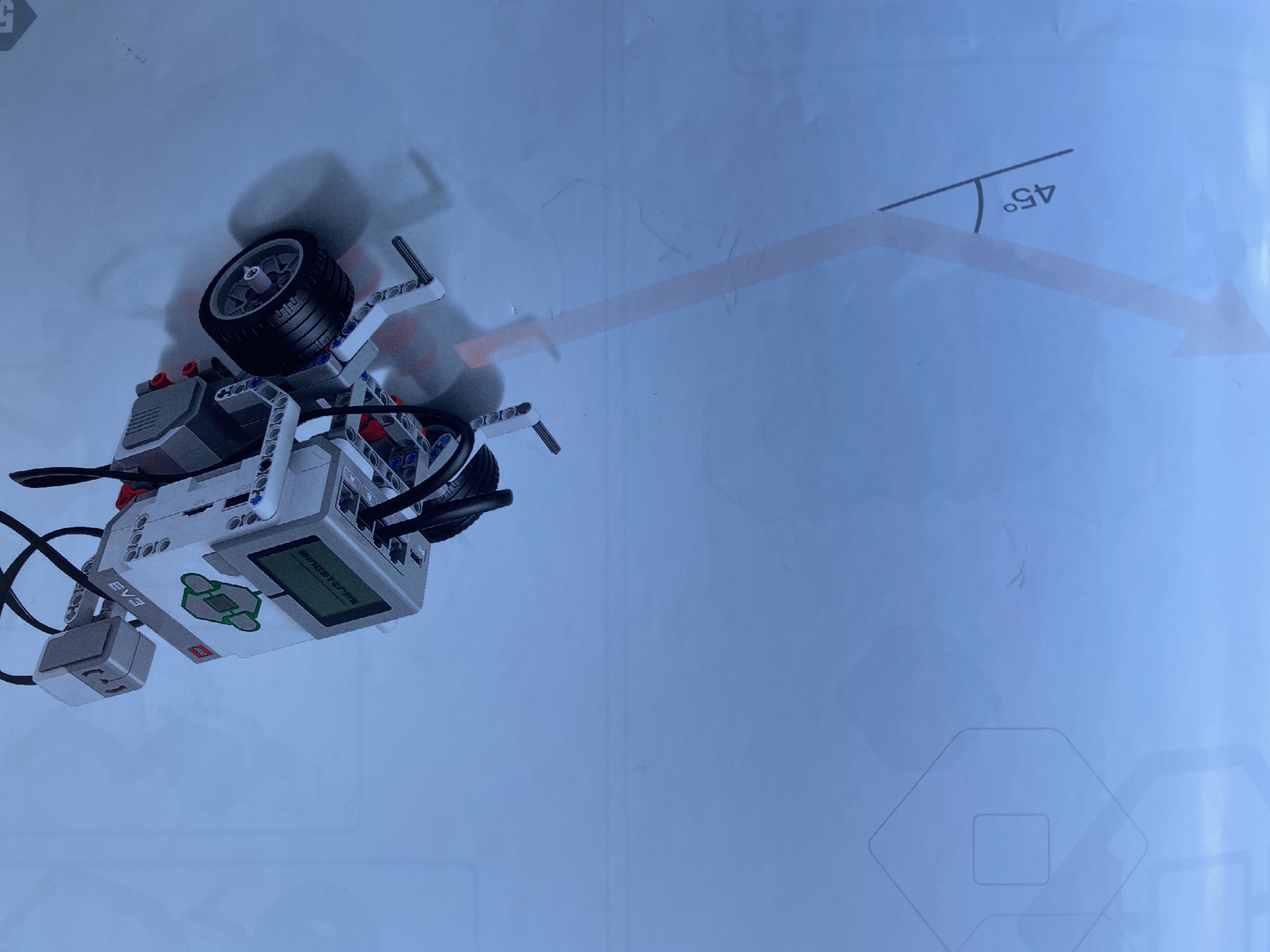
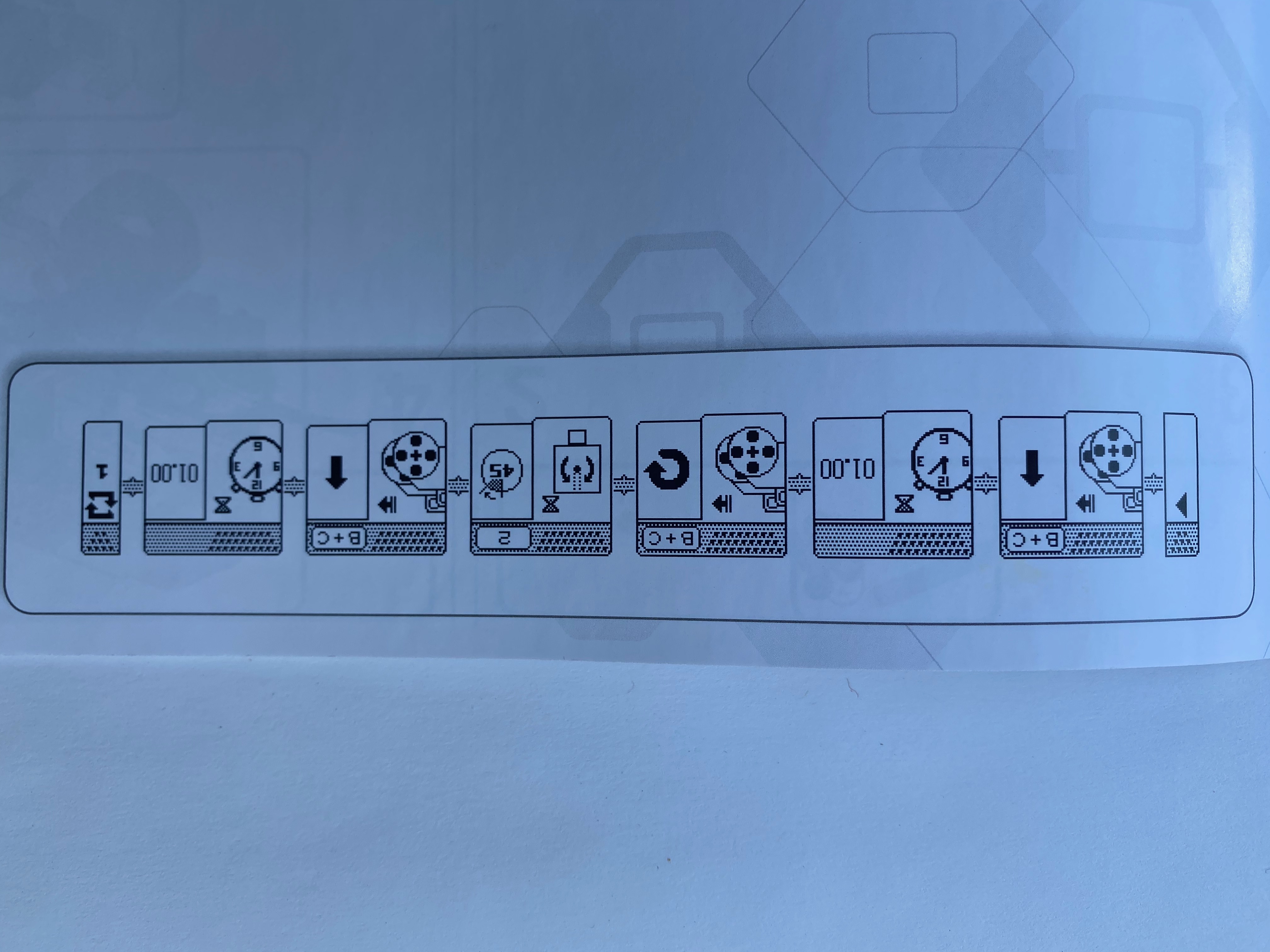
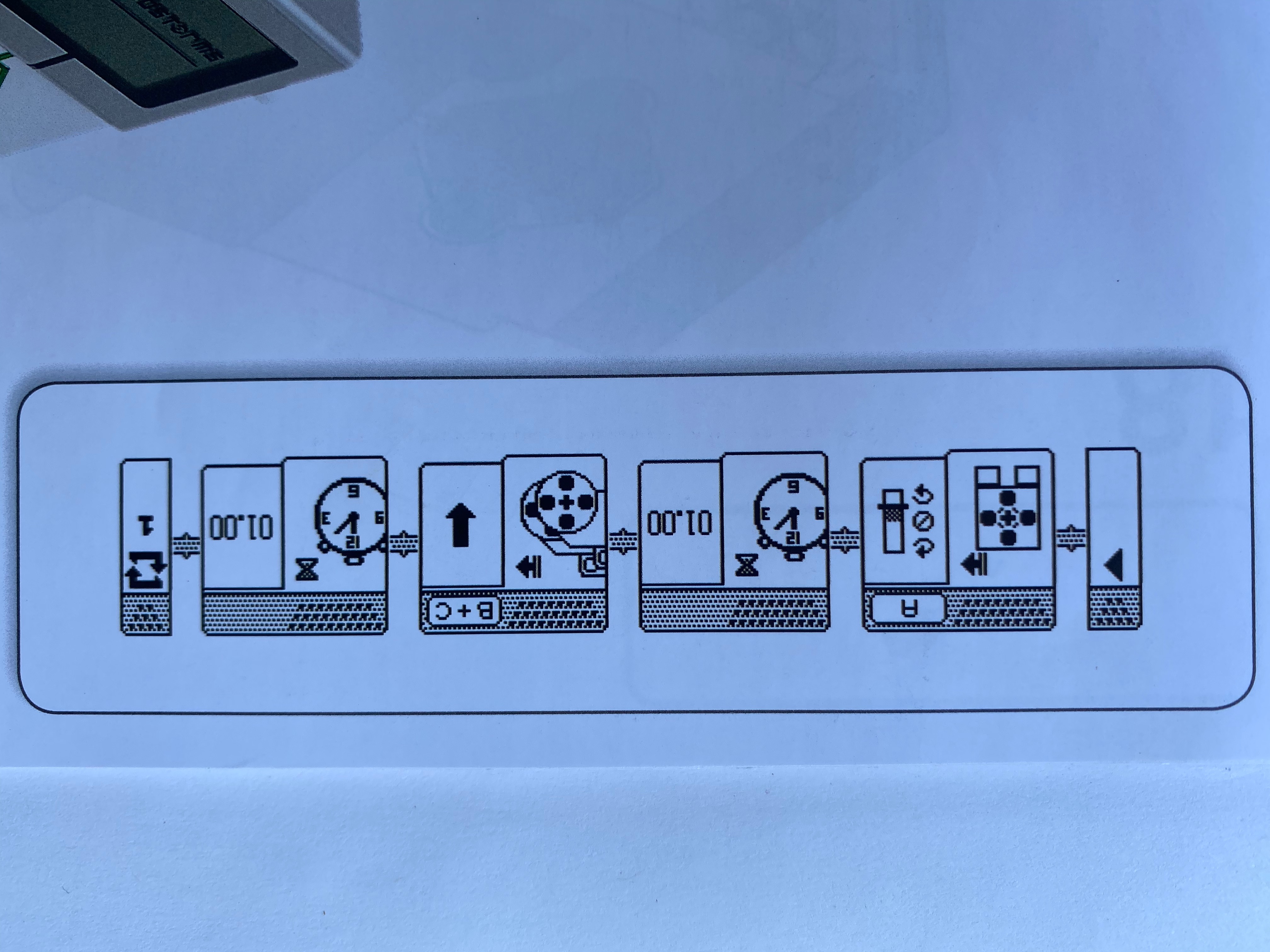
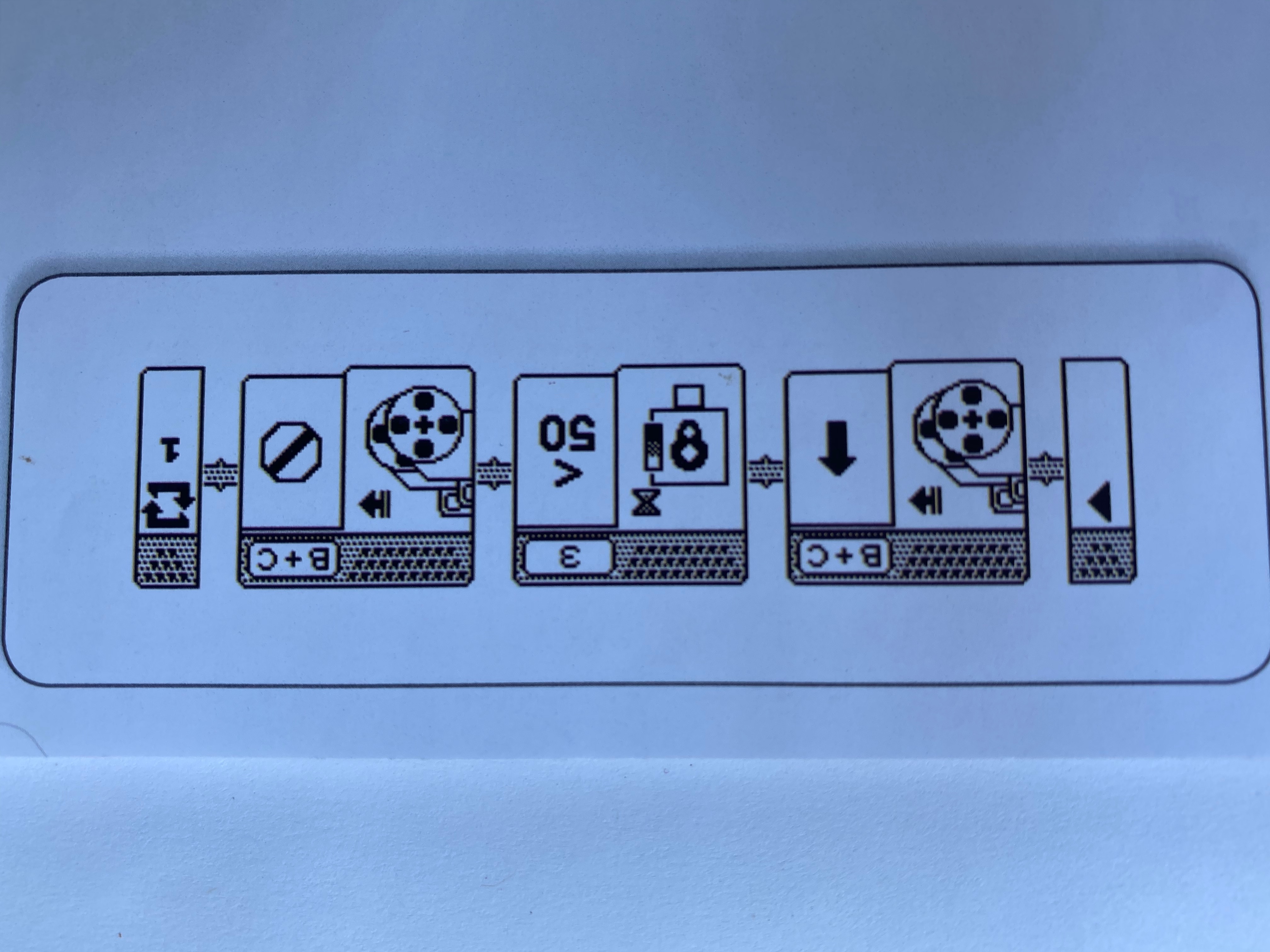
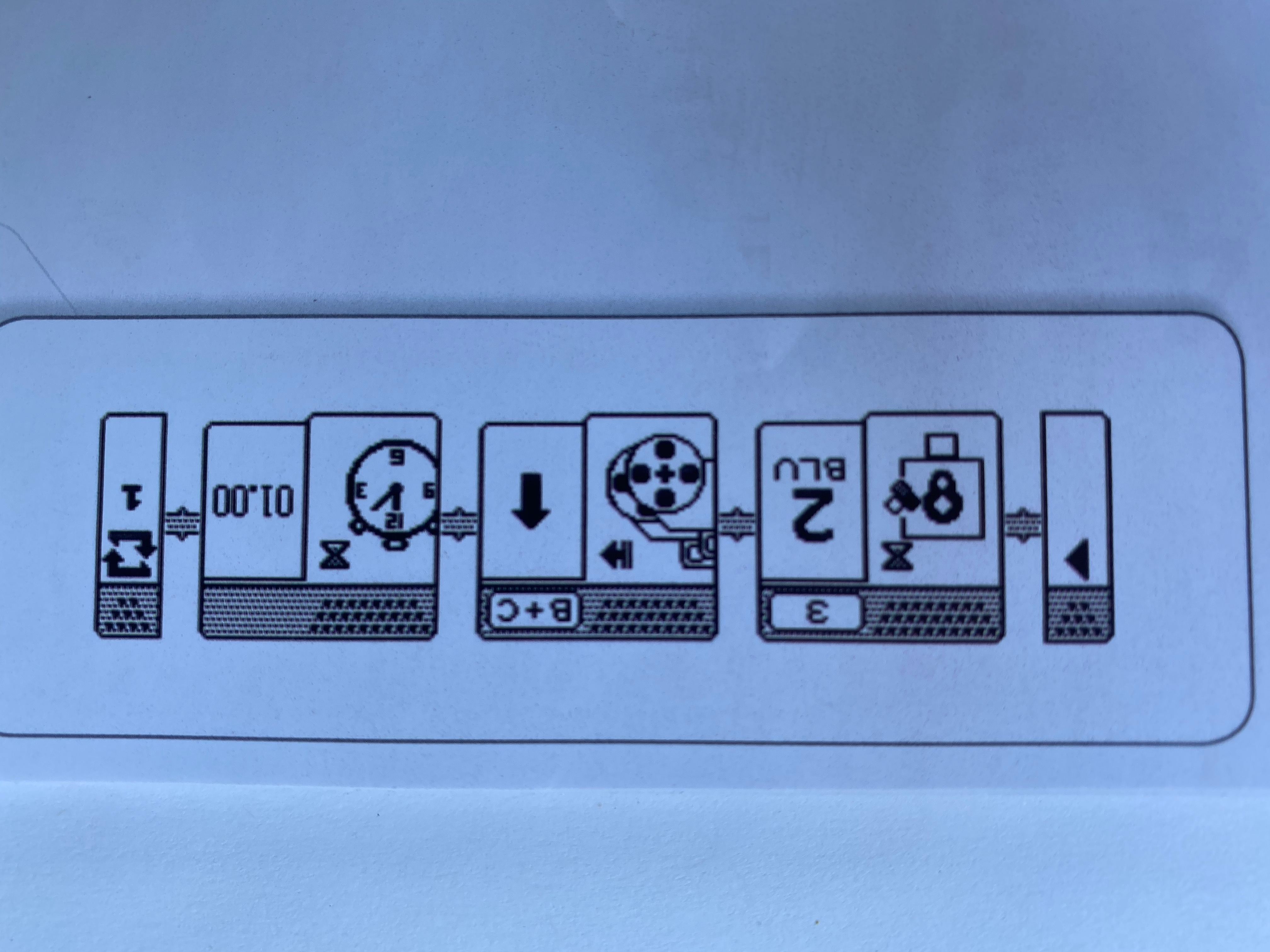
To Begin...Click the center button on your EV3 to turn it on. Now, apply the skills you learned above by programming your EV3 to perform the following tasks (When you succeed, call me over so that I can sign your gradesheet).
Note:You are limited to 16 segments of code per program. |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}